Blog Posts Tagged Electromagnetic Device series
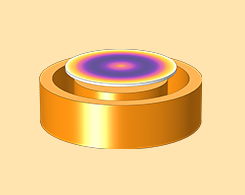
How to Model Electrodynamic Magnetic Levitation Devices
Is it magic or magnets? We define electrodynamic magnetic levitation and then go over how to model this phenomenon in COMSOL Multiphysics®.
How to Analyze an Induction Motor: A TEAM Benchmark Model
In this blog post, we demonstrate the modeling of the three-phase induction motor described in Testing Electromagnetic Analysis Methods (TEAM) workshop problem 30a.

Part 2: Model a Linear Electromagnetic Plunger with a Blocker
Learn how to model a linear electromagnetic plunger with an actuator that includes a blocker/stopper to restrict linear motion. Part 2 of a blog series on modeling electromagnetic devices.
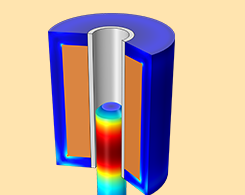
Part 1: How to Model a Linear Electromagnetic Plunger
Learn how to model a linear electromagnetic plunger in COMSOL Multiphysics®. Part 1 of a blog series on modeling electromagnetic devices.
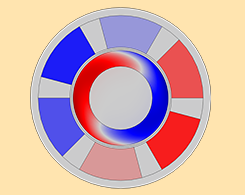
Modeling Magnetic Gears in COMSOL Multiphysics®
Learn how to simulate magnetic gears in 2D and 3D using COMSOL Multiphysics® in this comprehensive, step-by-step blog post.
Guidelines for Modeling Rotating Machines in 3D
Learn how to use the Rotating Machinery, Magnetic interface in COMSOL Multiphysics® to model a 3D generator, and then compare our results with an analogous 2D model. Part 2 of 2.
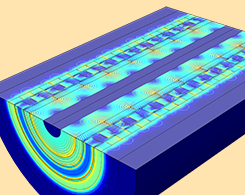
Modeling Linear Motors or Generators in COMSOL Multiphysics
We demonstrate how to customize a linear periodic boundary condition to model linear motors and generators in COMSOL Multiphysics®, with an example of a tubular generator used for wave energy.
How to Model Magnetic Bearings in COMSOL Multiphysics®
Get an in-depth introduction to the different types of magnetic bearings and then learn how to compute their magnetic force, torque, magnetic stiffness, and more.